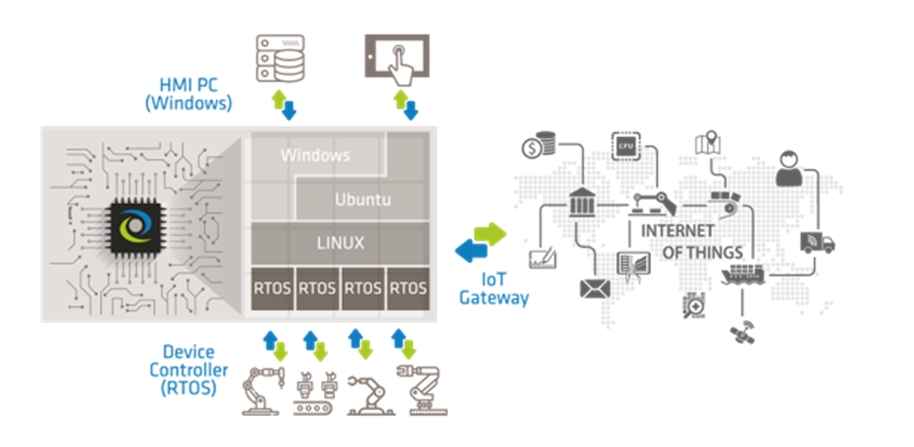
複数のキネマティクスや、コントロールパネル、および通信を備えた複雑なロボットの制御は、複数の仮想マシンに非常にきれいに分散することができます。 そのため、RTSハイパーバイザテクノロジーは、この業界の主要テクノロジーの1つとなっており、広く普及しています。 現在、インダストリー4.0とIIoT接続のニーズも追加されており、状況認識による協調も必要になってきています。 RTSハイパーバイザは、これらの追加タスクにも対応することができます。
リアルタイムイーサネットを介して通信する中央のPLCと多軸ドライブ制御の複雑なロボットのロジックは、非常に効率的に仮想マシンに分割することができます。現在、インダストリー4.0とIIoT接続のニーズも追加されており、状況認識による協調も必要になってきています。 RTSハイパーバイザは、これらの追加タスクにも対応することができます。
ロボットシステムに状況認識を提供するには、リアルタイム対応の仮想マシンを介して非常にうまく同期できる並列プロセスが必要です。 GPGPUなどの並列処理ユニットは、並列画像処理、超音波と赤外線の処理、深層学習アルゴリズムの利用などに最適です。
RTSハイパーバイザは、NUMAアーキテクチャをサポートしているため、x86とGPGPUを組み合わせるといった新たな並列処理のオプションを提供できるように設計されており、 CPUやGPUなどのさまざまなコンピューティングデバイス間で拡張することが可能です。さらに、コントロール用の仮想マシンのリアルタイム動作に影響を与えることなく、特権モードでPCIeグラフィックカードを使用することができます。
協調ロボットは、倉庫で使用される自動運転車などの自律システムとそれほどかけ離れてはいません。別の仮想マシンでロジックを完成させるために、衛星追跡や地理情報、リアルタイムのG5携帯接続を追加したい場合、たとえそれが、農業や採石、鉱山などの自律型ユーティリティ車両であっても、1つのハードウェアですべてのタスクを実行させることができます。
技術的な質問については、FAQセクション を必ずお読みください。 RTSハイパーバイザは、すべての一般的なRTOSとGPOSの構成に最適です。 お試しください!
お問い合わせ