
ロボット
リアルタイムシステムズ(RTS)と会社の歴史について教えてください?
15年前、イノベーターが Intel とAMDのシングルコアから手頃な価格の高計算で低電力のマルチコアプロセッサーに移行し始めたとき、当社の創設者はワークロードの統合が可能であることに気づきました。
その後、KUKA Roboticsでソフトウェアアーキテクト、デザイナー、開発者として働き、スピンオフとしてReal-Time Systems(RTS)を設立しました。
彼らは、マルチコアプロセッサの機能をロボット工学や産業用自動化の市場ニーズに適合させるというビジョンを追求しました。
今日、企業は、リアルタイムのパフォーマンスやハードウェアコストの削減など、RTSハイパーバイザのメリットを実感しています。
従来のハイパーバイザとの違いは何ですか?
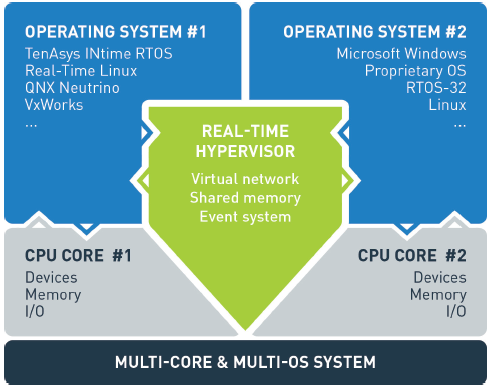
リアルタイムシステムズのハイパーバイザは、ハードウェアと直接連携して、パーティションを作成にします。このパーティショニングは、仮想化されたハードウェアまたはエミュレーターに依存している他のハイパーバイザーと一線を画します。競合他社は、ハイパーバイザ ソフトウェア スタックの最上位にゲストOSとアプリケーションを配置しています。ベアメタル ハイパーバイザを使用している場合でも、アプリケーションは実際のハードウェアではなく、エミュレートされたハードウェア上で実行されます。このソフトウェアレイヤーを通過すると、遅延とジッターが追加されます。
リアルタイムのパフォーマンスが必要な場合は、エミュレートされたハードウェアでは実現できません。弊社のハイパーバイザは、リアルタイムのパフォーマンスを提供します。
リアルタイムOSをホストするときにこのパーティショニングを行うには、マルチコア コンピューターを使用して、最初にCPUコア、メモリ、I/O、PCIeデバイスを分離し、それらを各OSに安全かつ確実に割り当てます。

ハイパーバイザはロボットにおいて、どのように使用されていますか?
HMI、ビジョン、モーション、データ分析、安全性などのシステム用に個別のハードウェアコンピューターを備えたロボットを使用するのではなく、これらのコンピューターシステムを1台のコンピューターに配置するロボットとして使用できます。
弊社のハイパーバイザは、CPUコア、PCIeデバイス、SATA、メモリを各システムに割り当て、独自の安全なスペースで実行することにより、ロボットシステムをエレガントに理解を容易にします。
さらに、共有メモリを使用してデータを交換することにより、ケーブルを介した通信に代わり、操作の決定論的な時間同期を備えた低遅延の共有メモリ空間を介して行われるため、通信はより高速になります。
そして、個別のハードウェア用に確保された、余分なケーブル、ラックスペース、コンピューターが不要となり、すべて1台のコンピューター集約され、ロボットシステムごとにハードウェアが大幅に節約されます。
貴社は、 Elkhart LakeおよびTiger Lakeなどの新しい第11世代プロセッサーに搭載したIntel@ TSN、TCCをサポートするプレミアムパートナーです。これらはなぜロボットにおいて重要で関連性があるのですか?
これは、 Intel と提携することの利点として、TSN、TCCのサポートがロボットにおいて重要かつ関連性があります。
ロボットの場合、低遅延で最小のジッターを備えた、信頼性の高い決定論的な通信とパフォーマンスが必要です。
これらの目標を達成するための重要な要素は、パーティショニング ソフトウェアとTSN、TCCとの緊密な統合です。 2008年からIntelと提携して、過去2年間、IntelのElkhart LakeおよびTiger Lakeエンジニアリングチームと緊密に連携して、ハイパーバイザとの緊密な統合を可能にしています。
この取り組みにより、TSNネットワークインターフェイスとTCC拡張機能をサポートするハイパーバイザを備えたロボットに最先端のシリコン機能がもたらされます。